Niveau de difficulté
Domaine
Contenu
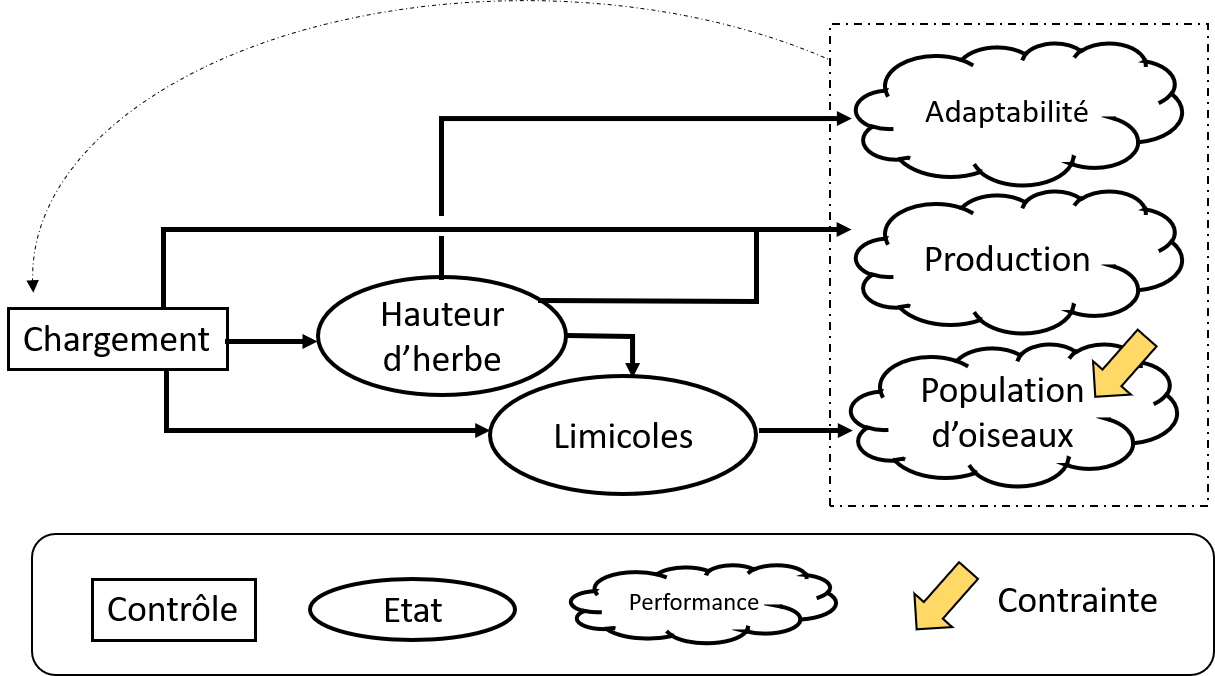
Le détail du modèle peut être retrouvé dans l'article suivant:
Rodolphe Sabatier, Luc Doyen, Muriel Tichit. Action versus Result-Oriented Schemes in grassland agroecosystem: A dynamic modelling approach. PLoS ONE, Public Library of Science, 2012, 7 (4), 11 p. ⟨10.1371/journal.pone.0033257⟩. ⟨hal-01191070⟩