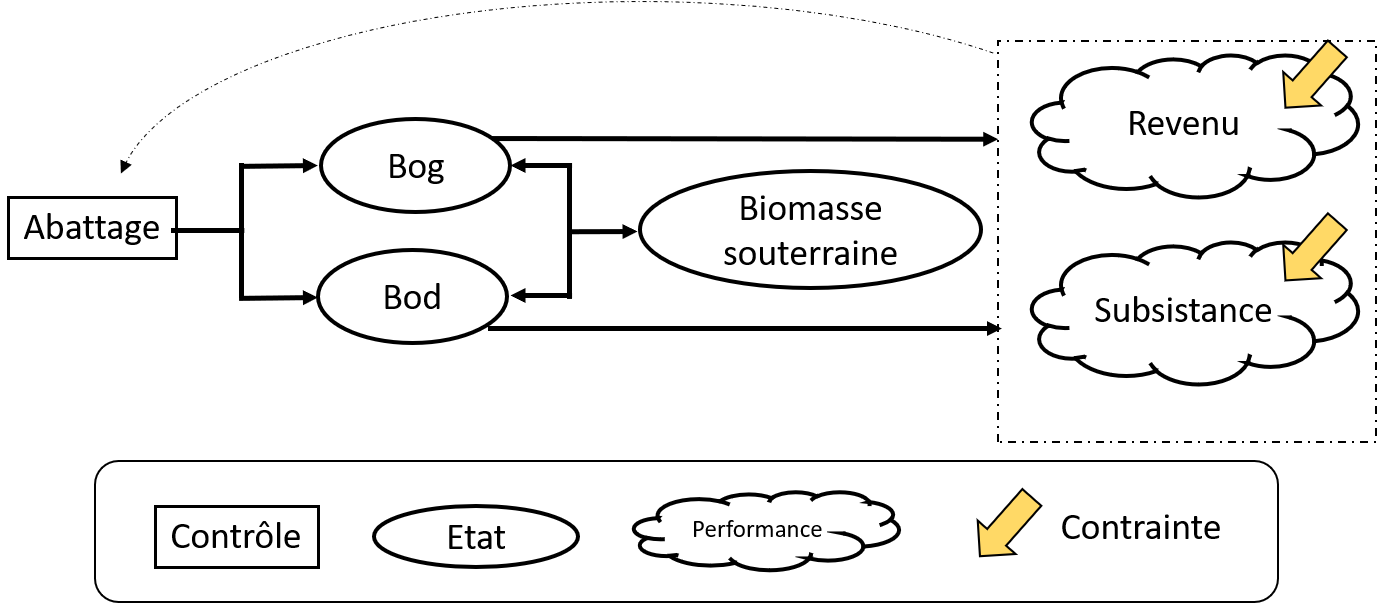
Ce système décrit une ferme et un restaurant appartenant à un même projet. Par conséquent, ils fonctionnent en étroite collaboration.
Description du système :
de Lapparent, A., Martin, S. & Sabatier, R. Using System Modularity to Simplify Viability Studies: An Application to a Farm-Restaurant Interaction. Environ Model Assess (2024). https://doi.org/10.1007/s10666-024-10014-w
L'objet calculé est un noyau de viabilité. Le modèle est discret en termes d'états, de contrôles et de temps.
Le calcul prend un instant (4088 s sur mon ordinateur), veuillez patienter…
Modèle
États et contrôles
Variables d'état
| Notation |
Description |
Number of points |
Maximal value |
Minimal value |
| $x_1$ |
Cumulative cash flow (€) |
41 |
100 000 |
0 |
| $x_2$ |
Restaurant attractivity coefficient (no unit) |
31 |
1 |
0 |
| $x_3$ |
General Index for Soil Quality |
51 |
1 |
0 |
la limite supérieure de $x_1$ peut être relâchée.
Variables de contrôle
| Notation |
Description |
Number of points |
Maximal value |
Minimal value |
| $u_1$ |
Choice of N-crops rotation |
126 |
126 |
1 |
| $u_2$ |
Surface dedicated to market gardening (in ha) |
21 |
2 |
0.05 |
| $u_3$ |
Price of a meal (in €) |
21 |
15 |
2 |
Dynamiques
Les dynamiques sont décrites par :
\begin{equation}
\mathcal{S}_U
\begin{cases}
x_{1}^{t+1} = x_{1}^t + G(x_{2}^t,u_{3}^t,R(x_3^t,u_1^t,u_2^t)) - E(u_{1}^t,u_{2}^t)\\
x_{2}^{t+1} = \alpha(x_{2}^t,u_{3}^t,R(x_3^t,u_1^t,u_2^t))\\
x_{3}^{t+1} = \Phi (x_{3}^t ,u_{1}^t,u_{2}^t) \\
\end{cases}
\end{equation}
avec comme fonctions :
|
Notation
|
Description
|
| $R(x_3,u_1,u_2)$ |
Agricultural production |
| $G(x_2,u_3,R(x_3,u_1,u_2))$ |
Restaurant economic outcome |
| $\alpha(x_2,u_3,R(x_3,u_1,u_2))$ |
Transition function for the restaurant attractivity |
| $\Phi(x_3,u_1,u_2)$ |
Transition function for the GISQ |
| $E(u_1,u_2)$ |
Cost of agricultural production |
Certaines dynamiques nécessitent l'utilisation de paramètres de grille. Par conséquent, une fonction a été implémentée dans le fichier source pour obtenir ces valeurs.
Constraintes
Ce système comporte deux contraintes : la rentabilité du système global et la préservation d'une qualité minimale des sols pour répondre aux enjeux de durabilité. Ces contraintes se traduisent par des seuils sur les flux de trésorerie cumulés ($x_{1} \geq x_{1min}$) et sur la qualité du sol ($x_3 \geq x_{3min}$), respectivement. En d'autres termes, $(x_1^t,x_2^t,x_3^t)$ doit rester dans $K$ pour tout $t\in \mathbb{N}$ avec :
\begin{equation}
K:=\{(x_1,x_2,x_3)\in \mathbb{R}^+\times [0;1]^2 \; |\; x_1\geq x_{1min} \text{ and }x_3\geq x_{3min}\}.
\end{equation}
Implementation parameters
Time horizon
The time horizon (for trajectory computations) is 20 years.
Algorithm parameters
Default parameters are used.
System parameters
We used the parameters for a low-hypotheses computation.
"SYSTEM_PARAMETERS": {
"DYNAMICS_TYPE": 2,
"DYN_BOUND": 1,
"DYN_BOUND_COMPUTE_METHOD": 2,
"IS_TIMESTEP_GLOBAL": 0,
"LIPSCHITZ_CONSTANT": 1,
"LIPSCHITZ_CONSTANT_COMPUTE_METHOD": 2,
"TIME_DISCRETIZATION_SCHEME": 4
}
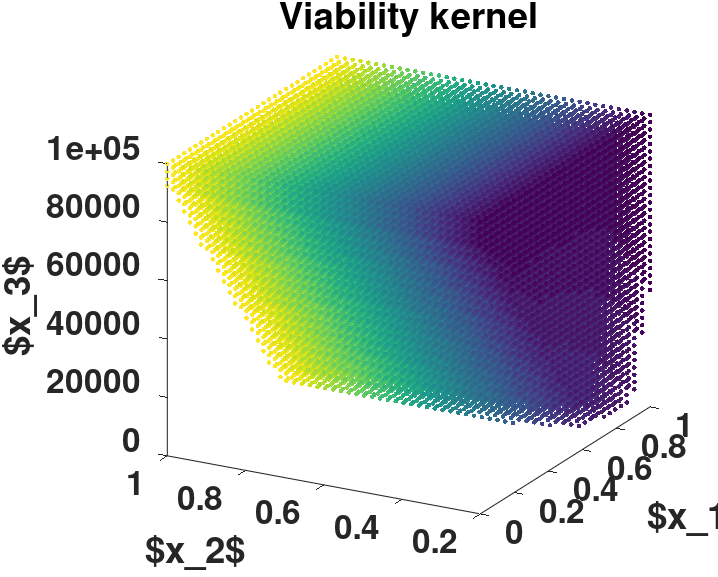
Viability kernel computed using ViabLab
Contenu à venir !