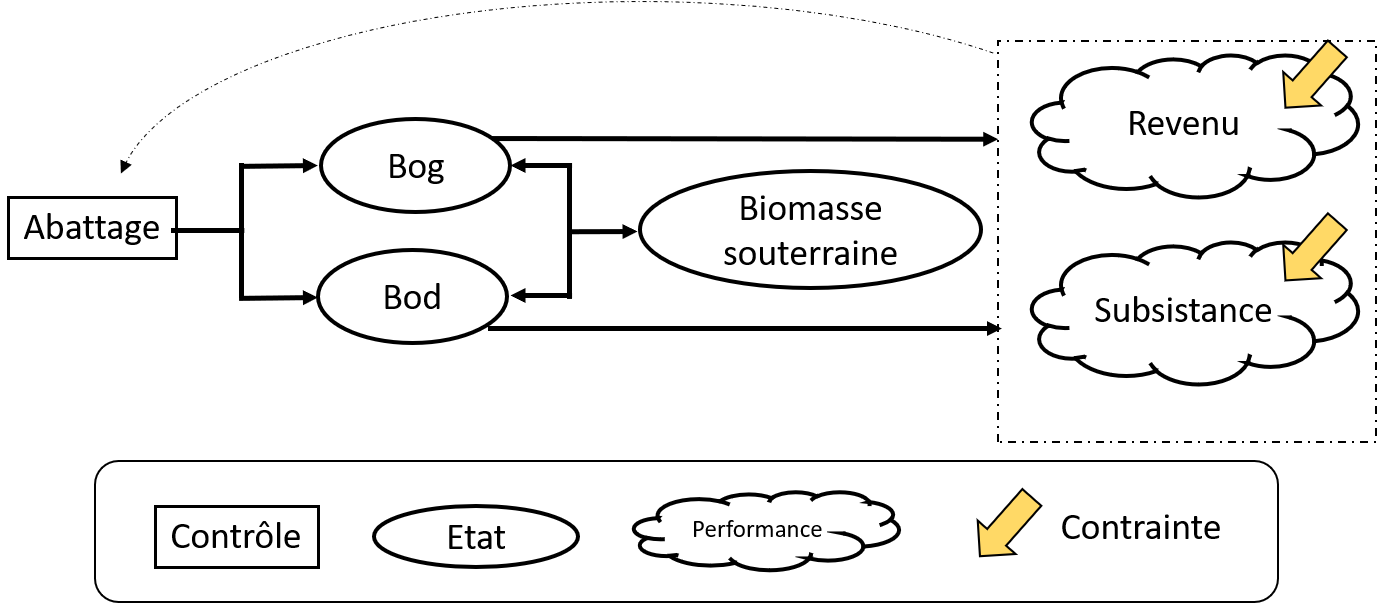
This system describes a farm and a restaurant belonging to a same project. Consequently, they function in full cooperation.
Description of the system :
de Lapparent, A., Martin, S. & Sabatier, R. Using System Modularity to Simplify Viability Studies: An Application to a Farm-Restaurant Interaction. Environ Model Assess (2024). https://doi.org/10.1007/s10666-024-10014-w
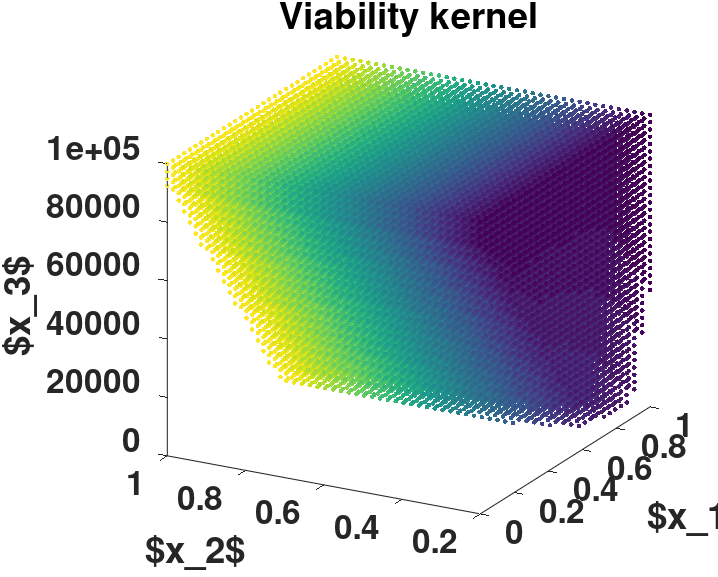
The object computed is a viability kernel. The model is discrete in states, controls and time.
The computation takes a moment (4088s on my computer), be patient...
Model
States and controls
State variables
| Notation |
Description |
Number of points |
Maximal value |
Minimal value |
| $x_1$ |
Cumulative cash flow (€) |
41 |
100 000 |
0 |
| $x_2$ |
Restaurant attractivity coefficient (no unit) |
31 |
1 |
0 |
| $x_3$ |
General Index for Soil Quality |
51 |
1 |
0 |
upper limit of $x_1$ can be relaxed.
Control variables
| Notation |
Description |
Number of points |
Maximal value |
Minimal value |
| $u_1$ |
Choice of N-crops rotation |
126 |
126 |
1 |
| $u_2$ |
Surface dedicated to market gardening (in ha) |
21 |
2 |
0.05 |
| $u_3$ |
Price of a meal (in €) |
21 |
15 |
2 |
Dynamics
Overall dynamics are:
\begin{equation}
\mathcal{S}_U
\begin{cases}
x_{1}^{t+1} = x_{1}^t + G(x_{2}^t,u_{3}^t,R(x_3^t,u_1^t,u_2^t)) - E(u_{1}^t,u_{2}^t)\\
x_{2}^{t+1} = \alpha(x_{2}^t,u_{3}^t,R(x_3^t,u_1^t,u_2^t))\\
x_{3}^{t+1} = \Phi (x_{3}^t ,u_{1}^t,u_{2}^t) \\
\end{cases}
\end{equation}
with the following functions:
|
Notation
|
Description
|
| $R(x_3,u_1,u_2)$ |
Agricultural production |
| $G(x_2,u_3,R(x_3,u_1,u_2))$ |
Restaurant economic outcome |
| $\alpha(x_2,u_3,R(x_3,u_1,u_2))$ |
Transition function for the restaurant attractivity |
| $\Phi(x_3,u_1,u_2)$ |
Transition function for the GISQ |
| $E(u_1,u_2)$ |
Cost of agricultural production |
Some dynamics require to use grid parameters. Consequently, a function has been implemented into the source file to get these values.
Constraints
There are two cconstraints in this system: the global system has to be profitable and a minimal soil quality has to be preserved in order to address sustainability concerns. These constraints take the form of thresholds on the cumulative cash flow ($x_{1} \geq x_{1min}$) and on soil quality ($x_3 \geq x_{3min}$), respectively. In other words, $(x_1^t,x_2^t,x_3^t)$ must remain in $K$ for all $t\in \mathbb{N}$ with :
\begin{equation}
K:=\{(x_1,x_2,x_3)\in \mathbb{R}^+\times [0;1]^2 \; |\; x_1\geq x_{1min} \text{ and }x_3\geq x_{3min}\}.
\end{equation}
Implementation parameters
Time horizon
The time horizon (for trajectory computations) is 20 years.
Algorithm parameters
Default parameters are used.
System parameters
We used the parameters for a low-hypotheses computation.
"SYSTEM_PARAMETERS": {
"DYNAMICS_TYPE": 2,
"DYN_BOUND": 1,
"DYN_BOUND_COMPUTE_METHOD": 2,
"IS_TIMESTEP_GLOBAL": 0,
"LIPSCHITZ_CONSTANT": 1,
"LIPSCHITZ_CONSTANT_COMPUTE_METHOD": 2,
"TIME_DISCRETIZATION_SCHEME": 4
}
Viability kernel computed using ViabLab
To compute apporximations of these viability kernels, simply place the .cpp file in ViabLab's /source directory and the .json file in the /INPUT directory.
Then, run ViabLab ; the output files will be placed in the /OUTPUT directory.
To visualize the viability kernel and its boundary, place the .py file in the /OUTPUT directory and run it.
For assistance, consult the training materials.